
|
|
|
 |
 |
 |
You are not logged in. Would you like to login?
![]() Offline
Offline
have a few questioned hopefully i can get some info on.
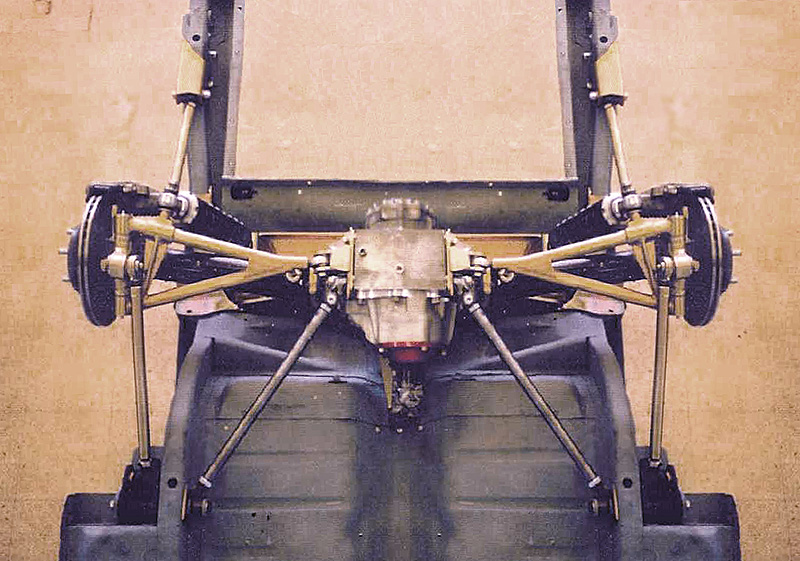
as a back ground i come from about 20 years of live axle racing and chassis construction of all forms from drag cars to rally cars, recently i took employment with an up and coming touring car,hot rod builder in the midwest. alot fo the cars they build are conventional 4 bar live axle street rods and pro touring muscle cars but we do build alot of IRS C-6 style double wishbone front and rears.
as part of learning this new line of work i want to get a better understanding of how these IRS rear function and how they should be assembled. many of the cars we build are actually used for local and national timed racing like the goodguys,ASSC as well as many magazine sponsored shootout events so we actually test what we build.
initially i would like to ask just a few starter questions just to get the ball rolling:
when setting up driveline angles the chassis we build allow virtually any engine/crankshaft height and angle because we remake all the vehicles floors to suit the new chassis. the question im asking is how much working u-joint angle do IRS rear like and need to operate properly? when i say working u-joint angle im talking the angle at the end of the driveshaft into the pinion, normally i work with 1-2 degrees maximum at the u-joint with the engine and pinion parellel with the least amount of height change as possible.
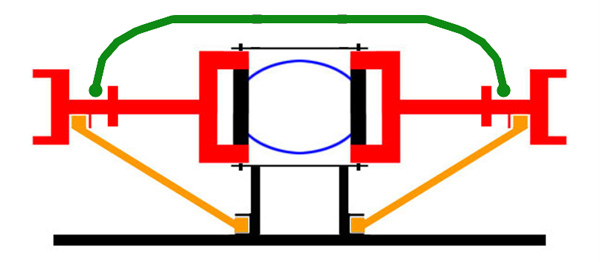
the second question has to do with chassis reaction from the side angles of the rear wishbone arms. essentially as i understand it the rear arms act in anti-squat the same as the front arm act in anti-dive other then the dive angle is up-side (lower arm angles up as opposed to the upper front arm angling down). the question is how much rear antisquat value is too much for these low slung lawnmowers?
apparently some of the vehicles at the track are experiencing what they describe as "wheel hop" and i just wonder if what there really are getting is actually too much bite.
hope to here from you guys soon and hope to contribute whatever i can thx in advance.
![]() Offline
Offline

1. The consensus seems to be a 3 degree pinion angle matched at both ends.
2. Anti squat angles very by necessity. Pure race such as F1 I believe runs zero. However typical, app. 3 degrees. Also, you may know, rear anti squat also gives anti dive with outboard brakes.
Ralphy
Last edited by Ralphy (2/07/2013 6:29 pm)
![]() Offline
Offline

wheel hop is extremely common with IRS during hard launches or hard acceleration. There are lots of ways to deal with this but the most productive has been to find a way to support the hub in a line parallel with the cars length. There is not one solution that is applicable to all the different stiles of IRS as they are vast so different, but the over all concept os the same.
![]() Offline
Offline
i assume you mean the wheel/tire/hub is playing out (toe out) under acceleration?....interesting
![]() Offline
Offline
It really is not so much an issue of toe as it is the forces for and aft put on the hub when accelerating. This causes the suspension to deflect a little bit and then the deflection gets absorbed by the suspension in the form of vertical suspension travel causing incosistant traction. I was at a race one time and most of the cars were lif axle. A few of them however had IRS and you could easily tell by the sound they made at launce. There was almost a whu whu whu whu sound until they got up to speed and got good traction.
![]() Offline
Offline
what im asking is since the hubs pitch (maybe the better term is yaw) fore and aft on acceleration essentially the vehicle scrubs the tire similar to how front wheel drive cars torque steer.
it would be similar to having a toe in condition where the driven vector forces kind of aim towards each other slighlty causing the tires to scrub. so the "hopping" would be the tire/hub assembly trying return to the at rest state ?
 1 of 1
1 of 1