
|
|
|
 |
 |
 |
You are not logged in. Would you like to login?

![]() Offline
Offline
Nice technical drawing of a Vette suspension but I dont have a vette. Just because the non parallel leading links converge to an IC doesn't really play any role in a watts linkage rather thats how anti dive/anti squat is determined and is for the most part is irrelevant. If my LCAs were mounted level at the center and the upright still had 15 degrees angularity the convergence point would not be the IC or RC. Technically it would create two roll centers at different heights To show a point it is best not to clutter the diagram with the other non related components. You still haven't shown how a parallelogram can create non parallel sides with relatively small amounts of movement. When viewed from the rear at normal ride height my LCA's are level and parallel with each other and the ground. When viewed from above the inner mount, LCA's and upright create a rectangle. Since the links cannot change lengths with movement, even the small amount of twist is equally distributed between the two LCA's and they remain a parallelogram. With that in mind the basic laws of geometry would have to be wrong for your claim of toe change to hold true. Even if my suspension were to move more dramatically front to rear it would not change the toe angle that is maintained by a parallelogram. With out the clutter show your work and prove how a parallelogram can change toe with out the hard parts changing lengths.
The only way toe can change on my suspension would be through the negative camber gain not the twin LCA's. The slight rotation of the upright acts like a change in caster angle and through that change in the contact patch in relationship to the upright the camber gain with suspension travel would create a change in toe. You have been barking up the wrong source from day one and think you are an authority while spewing wrong answers. LOL doesnt quite cover it.
By reducing the amount of upright rotation to the minimum I also reduced the change in toe to the minimum and thats how I came up with the numbers I did.
Any time you combine upright rotation with negative camber gain there will be a change in toe with travel. By using longer links that go over center and separating the mounts on the upright to the max the rotation can be reduced to an insignificant amount.
After looking more closely at the C4 design it would appear that GM deliberately placed the mount for the toe adjustment rod mount in the wrong place for a sports car. Built in roll understeer is not a performance option. Building cars that unskilled drivers could own and drive with out totaling it on their first four wheel drift I believe was their intention. Not true performance.
Last: my LCA's may not be in the form of a wish bone but that is not required to be a control arm. The criteria involved are as follows, They connect the bottom of the upright to the frame. they control camber, they control toe, they support the weight. With leading and trailing links supporting forward thrust, the LCA's do not need to help in this task. What other criteria did a LCA need to meet for your approval?
Last edited by tyrellracing (10/15/2012 6:46 pm)
![]() Offline
Offline
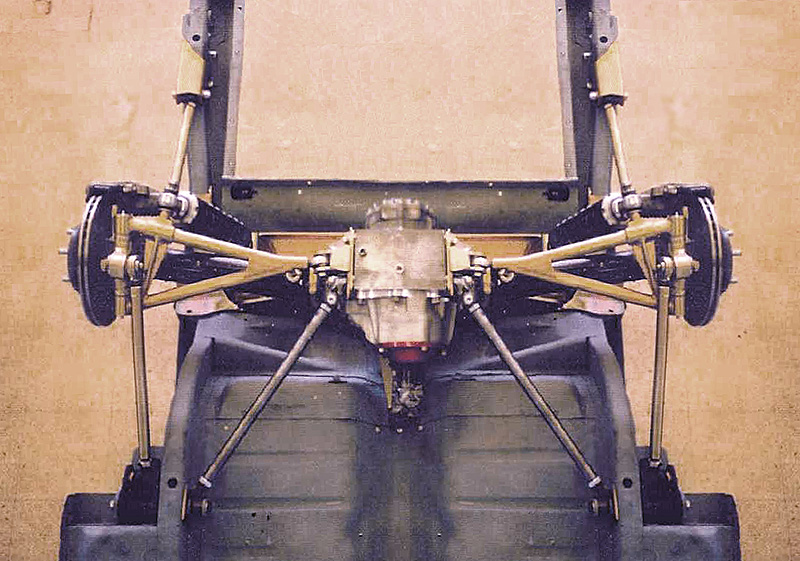
The angles of the leading and trailing links on both the t5 and the vette drawing you posted will exhibit at least one similar characteristic. They both raise the rear of the vehicle under acceleration and pull down during braking. Basic mild antisquat. You only need to look at the forces involved and realize that the links can only transmit forces parrellel to the link. That's where the instant center comes into play. That IC is the theoretical point where the forces are thought to converge and push the vehicle. If you draw lines through both leading and trailing links on a stock T5 their convergence point will be similar to the Vette's IC but a little higher. The C4 Vette shown is a negative camber gain type suspension. The uprights do not move vertical but due to the location of the leading links IC they move in a ark towards the rear.. TheC4 vette will have a change in toe for the same reason the stock T5.. The one thing I dont recal you ever mentioning is the relation between the camber gain and toe change. If you take the T5 with my twin LCA's spaced parrellel or the C4 and enter it into PJ's program but make the half shaft and the LCA the same length so there will no longer be a camber gain. Set the static camber to zero then see what happens to the toe when cycled through the program compared to both designs with the camber gain.
Last edited by tyrellracing (10/15/2012 12:49 am)
![]() Offline
Offline

Here is an interesting approach to anti-roll, and squat control.
![]() Offline
Offline

I think I saw that once before.
Ralphy
